Generate Random Walk¶
Random walks can be generated using generate().
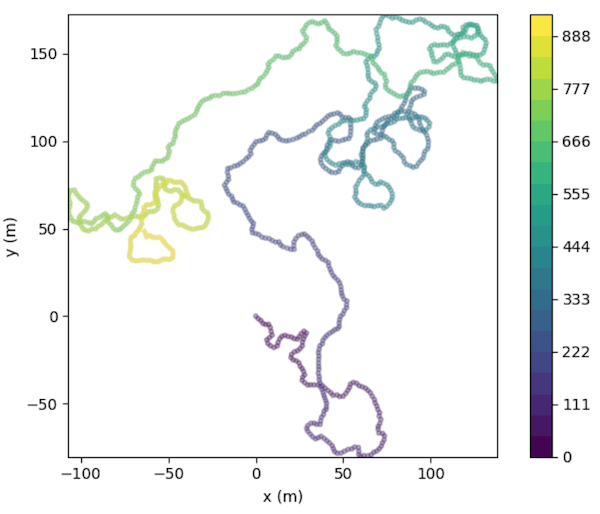
In [1]: import traja
# Generate random walk
In [2]: df = traja.generate(1000)
- traja.trajectory.generate(n: int = 1000, random: bool = True, step_length: int = 2, angular_error_sd: float = 0.5, angular_error_dist: Optional[Callable] = None, linear_error_sd: float = 0.2, linear_error_dist: Optional[Callable] = None, fps: float = 50, spatial_units: str = 'm', seed: Optional[int] = None, convex_hull: bool = False, **kwargs)[source]¶
Generates a trajectory.
If
randomisTrue, the trajectory will be a correlated random walk/idiothetic directed walk (Kareiva & Shigesada, 1983), corresponding to an animal navigating without a compass (Cheung, Zhang, Stricker, & Srinivasan, 2008). IfrandomisFalse, it will be(np.ndarray) a directed walk/allothetic directed walk/oriented path, corresponding to an animal navigating with a compass (Cheung, Zhang, Stricker, & Srinivasan, 2007, 2008).By default, for both random and directed walks, errors are normally distributed, unbiased, and independent of each other, so are simple directed walks in the terminology of Cheung, Zhang, Stricker, & Srinivasan, (2008). This behaviour may be modified by specifying alternative values for the
angular_error_distand/orlinear_error_distparameters.The initial angle (for a random walk) or the intended direction (for a directed walk) is
0radians. The starting position is(0, 0).- Parameters
n (int) – (Default value = 1000)
random (bool) – (Default value = True)
step_length – (Default value = 2)
angular_error_sd (float) – (Default value = 0.5)
angular_error_dist (Callable) – (Default value = None)
linear_error_sd (float) – (Default value = 0.2)
linear_error_dist (Callable) – (Default value = None)
fps (float) – (Default value = 50)
convex_hull (bool) – (Default value = False)
spatial_units – (Default value = ‘m’)
**kwargs – Additional arguments
- Returns
Trajectory
- Return type
trj (
traja.frame.TrajaDataFrame)
Note
Based on Jim McLean’s trajr, ported to Python.
Reference: McLean, D. J., & Skowron Volponi, M. A. (2018). trajr: An R package for characterisation of animal trajectories. Ethology, 124(6), 440-448. https://doi.org/10.1111/eth.12739.